


Safe Reinforcement Learning for Threat-Responsive Satellite Maneuvering
Sponsor: National Research FoundationDuration: 2025-2028 Our research develops reinforcement learning (RL)-based autonomous orbital maneuver algorithms for space environments, enabling threat avoidance, strategic repositioning, and mission continuity through advanced GNC frameworks. By incorporating Lyapunov-based stability constraints into the training process, we ensure both operational flexibility and physical stability, producing highly reliable autonomous maneuvering policies for next-generation space missions.

군집 임무 할당 및 경로 계획을 위한 멀티 에이전트 강화학습 기법 개발
Sponsor: National Research FoundationDuration: 2021-2024 자연계에서 관찰된 최적의 군집 법칙과 군집 동역학을 심층 신경망(deep neural network)에 임베딩하기 위한 방법 개발, 안전한 정적/동적 장애물 회피 학습을 위한 모델예측제어 기반 안전필터(safety filter) 개발, 군집 임무 할당 및 경로 계획 문제의 통합 해결을 위한 멀티 에이전트 강화학습 기법 개발을 연구 목표로 한다.
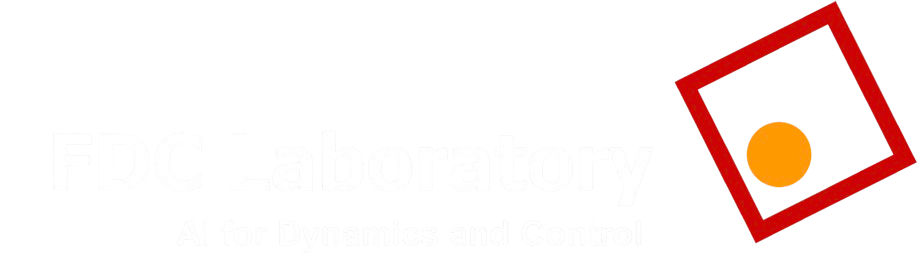
Wind Farm Optimal Control based on Multi-Agent Approach
Sponsor: 한국에너지기술평가원Duration: 2021-2025 풍력 발전 단지의 터빈을 적절하게 조정하여 전력을 증가시키고 전체적인 기계적 부하를 줄이기 위한 풍력 발전 단지 제어 알고리즘을 개발한다. 이를 위해 풍력 터빈을 후류를 통해 상호 작용하는 지능적 에이전트로 간주하고 에이전트 간 협업을 통해 공동의 목적을 달성하기 위한 데이터 기반 축소 모델 개발과 최적제어 및 멀티 에이전트 강화학습 기법을 개발한다.

심층강화학습 기반 모델추종제어를 이용한 드론 비행제어법칙 연구
Sponsor: National Research FoundationDuration: 2019-2022 심층강화학습(deep reinforcement learning) 기반 모델추종제어기법을 개발하고, 이를 드론 비행제어기 설계에 적용하여, 외부 환경 변화에 능동적으로 대처할 수 있는 지능비행 드론(deep drone)을 구현한다.

레이더 유도 시스템 전자전 모델링
Sponsor: 국방과학연구소Duration: 2016-2021 미사일 및 레이더 유도시스템의 종류와 기능별로 구성요소를 파악하고 이에 따른 모델링을 수행하며, 표적의 운동과 전자교란시스템의 모델을 함께 구축하여 통합된 가상의 전자전환경하에서 전자전을 수행할 수 있도록 한다. 또한 전자전 시뮬레이션을 통한 재밍 효과 분석 연구를 수행한다.

A Study on the Skip Trajectory Optimization for Hypersonic Reentry Vehicles
Sponsor: National Research FoundationDuration: 2016-2019 본 연구에서는 특정 고도에서 주어진 임무를 수행하기 위한 극초음속 우주비행체에 대한 스킵궤적을 온보드상에서 최적화하고 이를 검증하기 위하여, 저궤도 극초음속(hypersonic) 우주비행체의 스킵궤적(skip trajectory) 최적화 알고리즘, 다목적 최적화(multi-objective optimization)를 위한 고속 계산 알고리즘, 설계된 스킵궤적을 추종하는 추종제어 알고리즘을 개발하고, 재진입에서부터 목표지점에 도달하기까지의 PILS 환경 구축을 연구목표로 한다.

틸트로터 무인항공기 함상운영 기술 및 법 제도연구
Sponsor: 한국항공우주연구원Duration: 2016-2017 본 연구는 200kg급 틸트로터 무인기의 함상운용입증을 위한 기술개발 과제를 위해 항공기의 함 접근절차와 무인항공기의 해상운용을 위한 법/제도 조사 및 기술기준 방안을 제시한다.

Fault Detection and Control of Deepwater Offshore Wind Turbines
Sponsor: National Research FoundationDuration: 2011-2016 부유식 심해상 풍력터빈시스템의 안정성과 조종성, 신뢰성을 확보하고, 시스템의 기계적 하중을 최소화하면서, 바람에너지를 최대로 회수하기 위한 제어기 개발을 목표로 한다. 또한 풍력터빈시스템 주요 구성품의 고장검출을 위해 고장진단(fault detection) 필터를 설계하고, 풍력터빈시스템 고장에 대처하기 위한 최적 적응제어기법을 개발한다.

Carefree Maneuvering and Envelope Protection for the FBW Helicopter
Sponsor: 한국항공대학교Duration: 2013-2014 대상 헬리콥터의 비행영역한계를 해석하여 비행필수 변수로 대체하고, 유도된 비행필수 변수를 비행 중 실시간으로 OFP에서 모니터하며, 비행영역한계를 벗어나는 것을 예측하여 조종사로 하여금 적기에 조치를 취하게 하거나 시스템이 직접 대처하게 하는 제어 알고리즘을 설계한다.

Model Predictive Control of Offshore Wind Farms
Sponsor: 한국에너지기술평가원Duration: 2012-2013 해상 풍력단지의 발전량이 계통(TSO)의 발전요구량을 추종하고, 풍력단지를 구성하는 개별 풍력터빈의 피로하중이 최소화 하도록, 개별 풍력터빈의 발전량을 동적으로 할당하는 모델예측제어 알고리즘을 개발한다.

Helicopter Flight Control Law Design
Sponsor: 한국항공우주산업Duration: 2011-2012 본 연구에서는 Matlab/Simulink기반의 level 2 충실도를 가진 싱글로터형 헬리콥터 운동모델을 개발하고, 이를 바탕으로 전 비행영역에서 헬리콥터의 안정성과 조종성을 증대시키기 위한 조종안정성 증대장치(SCAS), 조종사의 임무부담을 감소시키고 비행성능을 극대화하기 위한 자동조종장치(Autopilot)를 설계한다.

Development of Control Algorithm for Wind Turbine
Sponsor: 한국에너지기술평가원Duration: 2010-2012 현대 제어기법을 사용하여 지상 풍력터빈시스템의 파워커브 추종제어를 설계하고, 드라이브트레인 및 타워구조물의 댐핑 증대를 통해 기계적 부하를 완화시키기 위한 진동억제 제어시스템을 설계한다.

고속무기체계 효과도 분석연구
Sponsor: 국방과학연구소Duration: 2010-2012 고속무기체계의 표적에 대한 효과도를 정량적으로 분석하기 위한 효과도 모델개발을 목표로 한다. 고속무기체계는 센서감응무기류(SFW)의 분산탄 또는 지능자탄 수십발을 장착한 고속 운반체이고, 표적으로서는 이동형 탄도미사일 발사대와 같은 Time Critical Target과 지상 견고표적을 대상으로 하여, 생존율 모델과 살상율 모델을 개발한다.
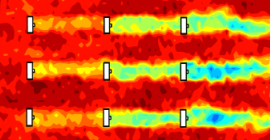
Study on the Development of Precision Attitude Reference System
on a Chip
Sponsor: Korea Research FoundationDuration: 2009-2010 The objective of this project is to develop core technologies for realizing low-cost, small-size, and high performance attitude reference system on a chip in order to overcome the drawbacks of current ARS and to meet the needs of various emerging application areas. The core technologies include robust structure design and analysis techniques to fabrication defects, low noise and high precision interface circuit design, compensation law design for nulling out the environment variations during its operation.

Image Aided Homing Missile Guidance
Sponsor: Korea Research FoundationDuration: 2007-2009 최근 전투기의 고성능화 또는 무인화가 진행되면서 급격한 기동이 가능해 짐에 따라 호밍미사일의 요격성능 향상이 크게 요구 되고 있다. 본 연구는 이러한 요구에 부응하여 유도루프에 영상센서를 도입하고 기존의 레이더와 같은 유도센서와 융합함으로써, 표적의 가속도(acceleration)를 신속, 정밀하게 추정하여 호밍 정밀도를 획기적으로 향상 시키는 것을 주요 목표로 한다.
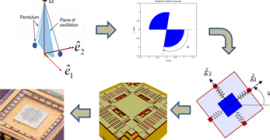
Modeling and Control of a Turboshaft Engine
Sponsor: 한국항공우주연구원Duration: 2006-2008 Achievements:
- Dynamic modeling of T-700 Turboshaft Engine using Matlab/Simulink
- Steady-state simulation results in good agreement with T-700 test data
- Transient performance analysis
- Design of a power turbine speed controller
Development of MEMS Inertial Sensors for Automotive Applications
Sponsor: Hyundai MobisDuration: 2004-2007 We developed MEMS inertial sensors to meet automotive industry’s expected need to implement roll-over detector and ESP. Our MEMS inertial sensors can be also used to measures a wide variety of dynamic motions for applications ranging from gaming, user interface control and gesture-recognition to UAVs, robotics, and video camera stabilizations.
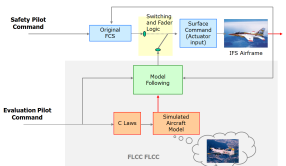
VSS Control System Design for In-Flight Simulations
Sponsor: 국방과학연구소Duration: 2004-2006 공중모의 비행시험기는 항공기에 작용하는 힘과 운동을 VSS기법인 모델 추종 제어기를 통해 대상항공기의 그것과 일치시키며 하늘을 비행하는 자유도를 가지도록 함으로써, 시각적인 영상과 육체적, 심리적인 스트레스의 현실적 특성을 반영하여 지상모의 시험장비(Ground Simulator )의 부정확하거나 다소 결여된 운동 신호와 시각적인 제한을 피할 수 있도록 한 것이다. 본 연구는 기술시현기를 신규 개발 항공기의 비행성 평가 및 비행조종계통의 설계 안전성 검증을 위한 공중모의 비행시험기로의 활용을 위해 필수적인 VSS 기법을 연구하고 이를 시뮬레이션을 통해 검증하는데 목적이 있다.
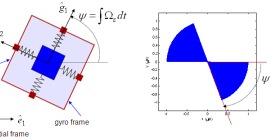
Control Algorithm for a Vibratory Angle Measuring Gyroscope
Sponsor: Korea Research FoundationDuration: 2004-2005 본 연구는 이미 개발된 진동형 각속도 자이로스코프 구조를 그대로 이용하여 자세 또는 방위각을 직 접 측정할 수 있는, 진동형 각측정 자이로스코프의 제어 알고리즘 개발을 목적으로 한다.